A quaternion is a number system that extends the complex numbers. While complex numbers have a real part and an imaginary part (of the form a + bi, where "a" and "b" are real numbers and "i" is the imaginary unit), quaternions have four parts: a scalar (real) part and a vector part with three imaginary components.
The standard notation for a quaternion is often written as: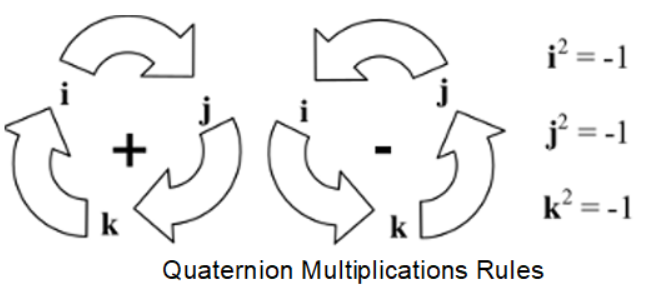
q=a+bi+cj+dk
Where:
- a is the scalar (real) part,
- b,c,d are the vector (imaginary) parts, and
- i,j,k are the imaginary units satisfying certain multiplication rules.
The multiplication of quaternions is non-commutative, meaning that a⋅b is not necessarily equal to b⋅a. The multiplication rules for the imaginary units are defined as follows
i2 = j2 = k2 = i⋅j⋅k = −1
Quaternions have applications in various fields, including computer graphics, computer vision, and physics. In aerospace, quaternions are particularly useful for rotating vectors around an axis without gimbal lock and for performing rotations between coordinate frames. This latter characteristics with coordinate frames makes quaternions the ideal tool for determining the attitude of objects in animations and in real life, such as the attitude of an orbiting satellite.