
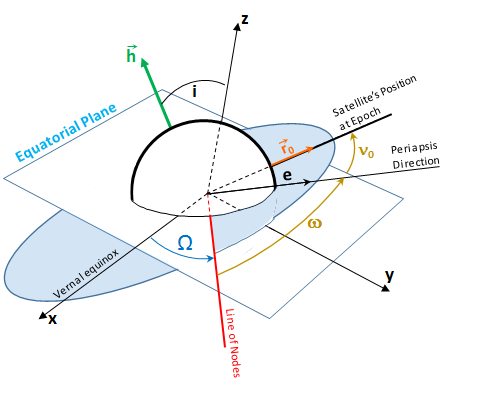
Eccentricity Vector
→e=(1μ)⋅[(v2-μr)→r-(→r⋅→v)→v]
Tags | |
UUID | 011767c1-e3bb-11e3-b7aa-bc764e2038f2 |
The Eccentricity Vector calculator computes the orbital eccentricity vector based on the velocity vector (V) and the position vector (R).
INSTRUCTIONS: Enter the following:
- (→v) Velocity Vector in meters per second (comma separated values)
- (→r) Position Vector in meters (comma separated values)
Eccentricity Vector (→e): The calculator returns the eccentricity vector.
The Math / Science
This equation produces the three components of the Eccentricity Vecotor, →e
Notes
The orbits and trajectories that can be characterized by eccentricity are:
|
elliptical: circular: e = 1 parabolic trajectory hyperbolic trajectory |
0 < e < 1 e = 1 e = 1 e> 1 |
3D Vector Functions
- k V - scalar multiplication
- V / |V| - Computes the Unit Vector
- |V| - Computes the magnitude of a vector
- U + V - Vector addition
- U - V - Vector subtraction
- |U - V| - Distance between vector endpoints.
- |U + V| - Magnitude of vector sum.
- V • U - Computes the dot product of two vectors
- V x U - Computes the cross product of two vectors
- V x U • W - Computes the mixed product of three vectors
- Vector Angle - Computes the angle between two vectors
- Vector Area - Computes the area between two vectors
- Vector Projection - Compute the vector projection of V onto U.
- Vector Rotation - Compute the result vector after rotating around an axis.
- (ρ, θ, φ) to (x,y,z) - Spherical to Cartesian coordinates
- (x,y,z) to (ρ, θ, φ) - Cartesian to Spherical coordinates
- (r, θ, z) to (x,y,z) - Cylindrical to Cartesian coordinates
- (x,y,z) to (r, θ, z) - Cartesian to Cylindrical coordinates
- Vector Normal to a Plane Defined by Three Points
This equation, Eccentricity Vector, references 2 pages
Equations and Data Items
This equation, Eccentricity Vector, is used in 1 page
Calculators
- Comments
- Attachments
- Stats
No comments |
This site uses cookies to give you the best, most relevant experience. By continuing to browse the site you are agreeing to our use of cookies.