
LM 7_5 Rotational invariance Collection
7.5 Rotational invariance by Benjamin Crowell, Light and Matter licensed under the Creative Commons Attribution-ShareAlike license.
7.5 Rotational invariance (optional)
Let's take a closer look at why certain vector operations are useful and others are not. Consider the operation of multiplying two vectors component by component to produce a third vector:
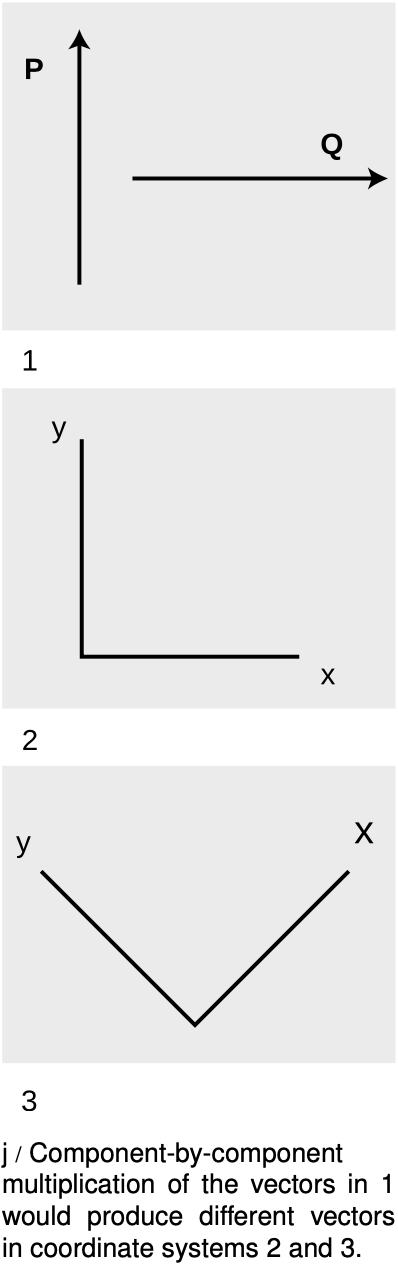
As a simple example, we choose vectors and to have length 1, and make them perpendicular to each other, as shown in figure j/1. If we compute the result of our new vector operation using the coordinate system in j/2, we find:
The component is zero because , the component is zero because , and the component is of course zero because both vectors are in the plane. However, if we carry out the same operations in coordinate system j/3, rotated 45 degrees with respect to the previous one, we find
The operation's result depends on what coordinate system we use, and since the two versions of have different lengths (one being zero and the other nonzero), they don't just represent the same answer expressed in two different coordinate systems. Such an operation will never be useful in physics, because experiments show physics works the same regardless of which way we orient the laboratory building! The useful vector operations, such as addition and scalar multiplication, are rotationally invariant, i.e., come out the same regardless of the orientation of the coordinate system.
Example 8: Calibrating an electronic compass
Some smart phones and GPS units contain electronic compasses that can sense the direction of the earth's magnetic field vector, notated . Because all vectors work according to the same rules, you don't need to know anything special about magnetism in order to understand this example. Unlike a traditional compass that uses a magnetized needle on a bearing, an electronic compass has no moving parts. It contains two sensors oriented perpendicular to one another, and each sensor is only sensitive to the component of the earth's field that lies along its own axis. Because a choice of coordinates is arbitrary, we can take one of these sensors as defining the axis and the other the . Given the two components and , the device's computer chip can compute the angle of magnetic north relative to its sensors, .
All compasses are vulnerable to errors because of nearby magnetic materials, and in particular it may happen that some part of the compass's own housing becomes magnetized. In an electronic compass, rotational invariance provides a convenient way of calibrating away such effects by having the user rotate the device in a horizontal circle.
Suppose that when the compass is oriented in a certain way, it measures and (in certain units). We then expect that when it is rotated 90 degrees clockwise, the sensors will detect and .
But imagine instead that we get and . This would violate rotational invariance, since rotating the coordinate system is supposed to give a different description of the same vector. The magnitude appears to have changed from 1.00 to , and a vector can't change its magnitude just because you rotate it. The compass's computer chip figures out that some effect, possibly a slight magnetization of its housing, must be adding an erroneous 0.2 units to all the readings, because subtracting this amount from all the values gives vectors that have the same magnitude, satisfying rotational invariance.
7.5 Rotational invariance by Benjamin Crowell, Light and Matter licensed under the Creative Commons Attribution-ShareAlike license.
Calculators and Collections
- Comments
- Attachments
- Stats
No comments |