The Vector Norm calculator computes the norm, aka magnitude, of a three dimensional vector (V).
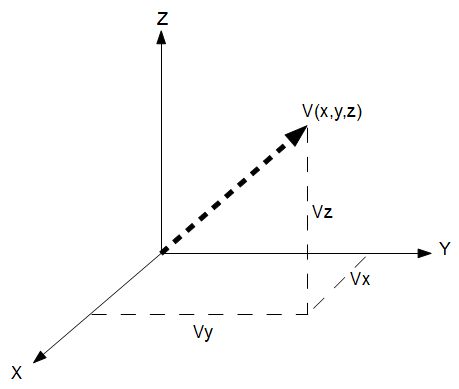
Vector in three dimensions
INSTRUCTIONS: Enter the following:
- (`||vecv||`) : Enter the x, y and z components of V separated by commas (e.g. 2,9,3)
Vector Norm |V|: The calculator returns the magnitude of the vector (e.g.9.69)
The Math / Science
This formula lets the user enter a three dimensional vector with X, Y and Z components and calculates the magnitude of the vector |V|. The formula to compute the vector magnitude is:
`|V| = sqrt(x²+y²+z²)`
where:
- |V| is the magnitude of the vector
- x, y and z are the components of the vector.
Visually, the magnitude of the vector is the length of measurement from the origin of the coordinate system to the end point of the vector.
3D Vector Functions
 k⋅V - scalar multiplication
k⋅V - scalar multiplication- V/k - scalar division
- V / |V| - Computes the Unit Vector
- |V| - Computes the magnitude of a vector
- U + V - Vector addition
- U - V - Vector subtraction
- |U - V| - Distance between vector endpoints.
- |U + V| - Magnitude of vector sum.
- V • U - Computes the dot product of two vectors
- V x U - Computes the cross product of two vectors
- V x U • W - Computes the mixed product of three vectors
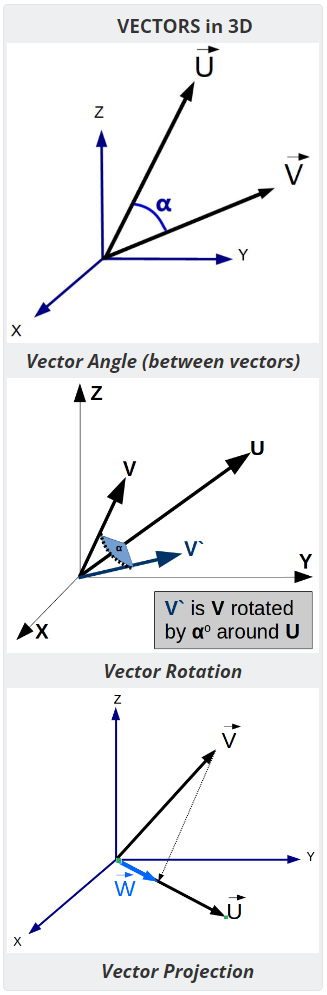
- Vector Angle - Computes the angle between two vectors
- Vector Area - Computes the area between two vectors
- Vector Projection - Compute the vector projection of V onto U.
- Vector Rotation - Compute the result vector after rotating around an axis.
- Vector Components 3D - Returns a vector's magnitude, unit vector, spherical coordinates, cylindrical coordinates and angle from each axis.
- (ρ, θ, φ) to (x,y,z) - Spherical to Cartesian coordinates
- (x,y,z) to (ρ, θ, φ) - Cartesian to Spherical coordinates
- (r, θ, z) to (x,y,z) - Cylindrical to Cartesian coordinates
- (x,y,z) to (r, θ, z) - Cartesian to Cylindrical coordinates
- (x,y) to (r, θ) - Cartesian to Polar
- (r, θ) to (x,y) - Polar to Cartesian
- Vector Normal to a Plane Defined by Three Points
Usage
There all kinds of vectors applied in physics for forces, positions, velocities, acceleration, etc. The position vector, often represented by `rvec` can be decomposed into its components parallel to the Euclidean three-space axes: `vecr = r_xrhati + r_yhatj + r_zhatk`
Similarly, a velocity vector could be decomposed into its Euclidean components as: `vecv = v_xrhati + v_yhatj + v_zhatk`
