Processing...
`R = f(oA,sA,beta)`
Enter a value for all fields
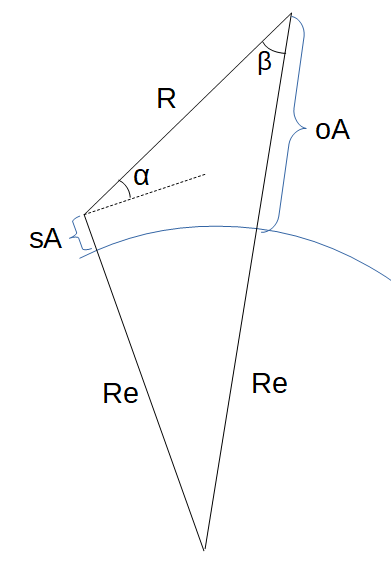
The Slant Range from Subtended Anglecalculator computes the slant range (R) from a ground station to an object (satellite or aircraft) based on the station and object altitudes and the subtended angle (β). 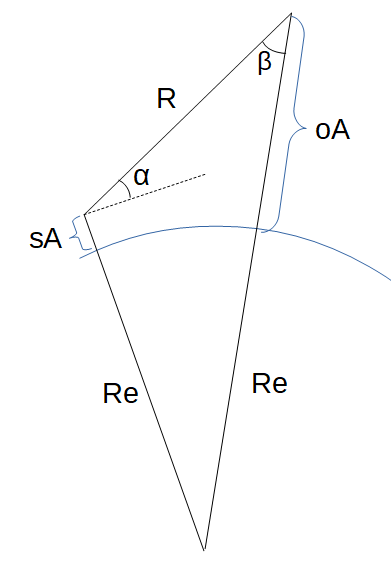
INSTRUCTIONS: Choose units and enter the following:
- (sA) Station Altitude above Mean Earth Radius
- (β) Subtended Angle (aka Look Angle)
- (oA) Object Altitude above Mean Earth Radius
Slant Range (R): The range is returned in kilometers. However this can be automatically converted to compatible units via the pull-down menu.
The Math / Science
The formula for the slant range uses both the law of sines and cosines. In the obtuse triangle below: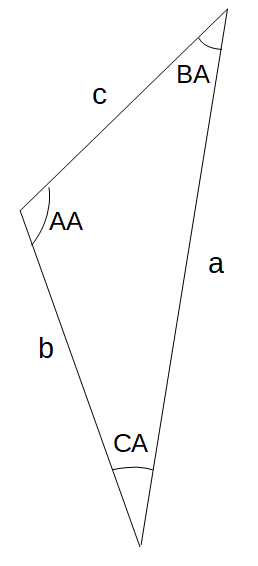
- b = Re + sA
- a = Re + oA
- c is the slant range
- CA is the Earth Central Angle
- BA is the subtended angle (β)
- AA is elevation angle (α) + 90°
where:
- ` a/(sin("AA")) = b / (sin("BA")) = c / (sin("CA"))`
- CA = π - BA - AA
- `c^2 = a^2 + b^2 - 2a*b*cos(CA) `
- Therefore: `c = sqrt( a^2 + b^2 - 2a*b*cos(CA) )`
- SNR Gain Due to Azimuth Processing (coherent pulse integration)
- SNR Gain Due to Range Processing (pulse compression)
- Target Radar Cross Section
- Monostatic SAR Transmitter Antenna Gain Factor
- Radar Atmospheric Loss
- SAR Duty Factor
- Grazing Angle
- Slant Range
- Slant Range (Beta Angle)
Earth Model Calculators
- Slant Range using Position Vectors
- Slant Range from Elevation Angle (α)
- Slant Range using Subtended Angle (β)
- Distance to Horizon
- Angle of Satellite Visibility
- Grazing Angle
- XYZ to Latitude, Longitude, Altitude
- Earth WGS-84 Equatorial radius in meters: 6378137.0 m
- Earth WGS-84 Polar radius in meters: 6356752.31424518 m
- Earth Flattening Factor (WGS-84): 0.00335281066474748071984552861852
- Ellipse flattening factor: F = (Er - Pr)/Er
- Geocentric to Geodetic Latitude
- Geodetic to Geocentric Latitude
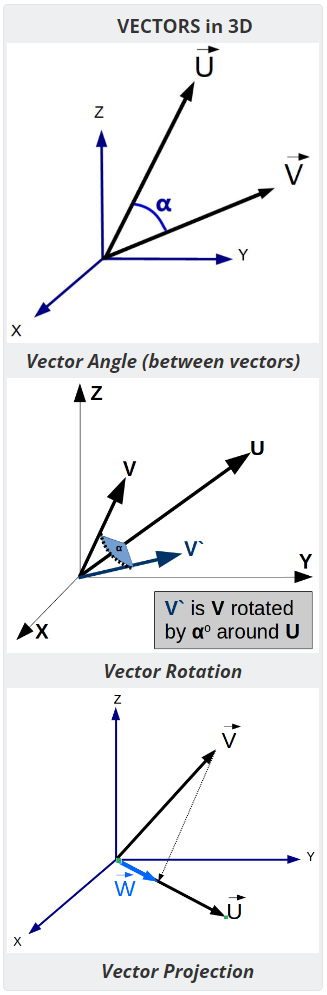
3D Vector Functions
 k⋅V - scalar multiplication
k⋅V - scalar multiplication- V/k - scalar division
- V / |V| - Computes the Unit Vector
- |V| - Computes the magnitude of a vector
- U + V - Vector addition
- U - V - Vector subtraction
- |U - V| - Distance between vector endpoints.
- |U + V| - Magnitude of vector sum.
- V • U - Computes the dot product of two vectors
- V x U - Computes the cross product of two vectors
- V x U • W - Computes the mixed product of three vectors
- Vector Angle - Computes the angle between two vectors
- Vector Area - Computes the area between two vectors
- Vector Projection - Compute the vector projection of V onto U.
- Vector Rotation - Compute the result vector after rotating around an axis.
- Vector Components 3D - Returns a vector's magnitude, unit vector, spherical coordinates, cylindrical coordinates and angle from each axis.
- (ρ, θ, φ) to (x,y,z) - Spherical to Cartesian coordinates
- (x,y,z) to (ρ, θ, φ) - Cartesian to Spherical coordinates
- (r, θ, z) to (x,y,z) - Cylindrical to Cartesian coordinates
- (x,y,z) to (r, θ, z) - Cartesian to Cylindrical coordinates
- (x,y) to (r, θ) - Cartesian to Polar
- (r, θ) to (x,y) - Polar to Cartesian
- Vector Normal to a Plane Defined by Three Points